
모든 파트는 병진자유도 3개와 회전자유도 3개를 가지고 있다. 즉, 파트는 6개 방향으로 움직일 수 있다.

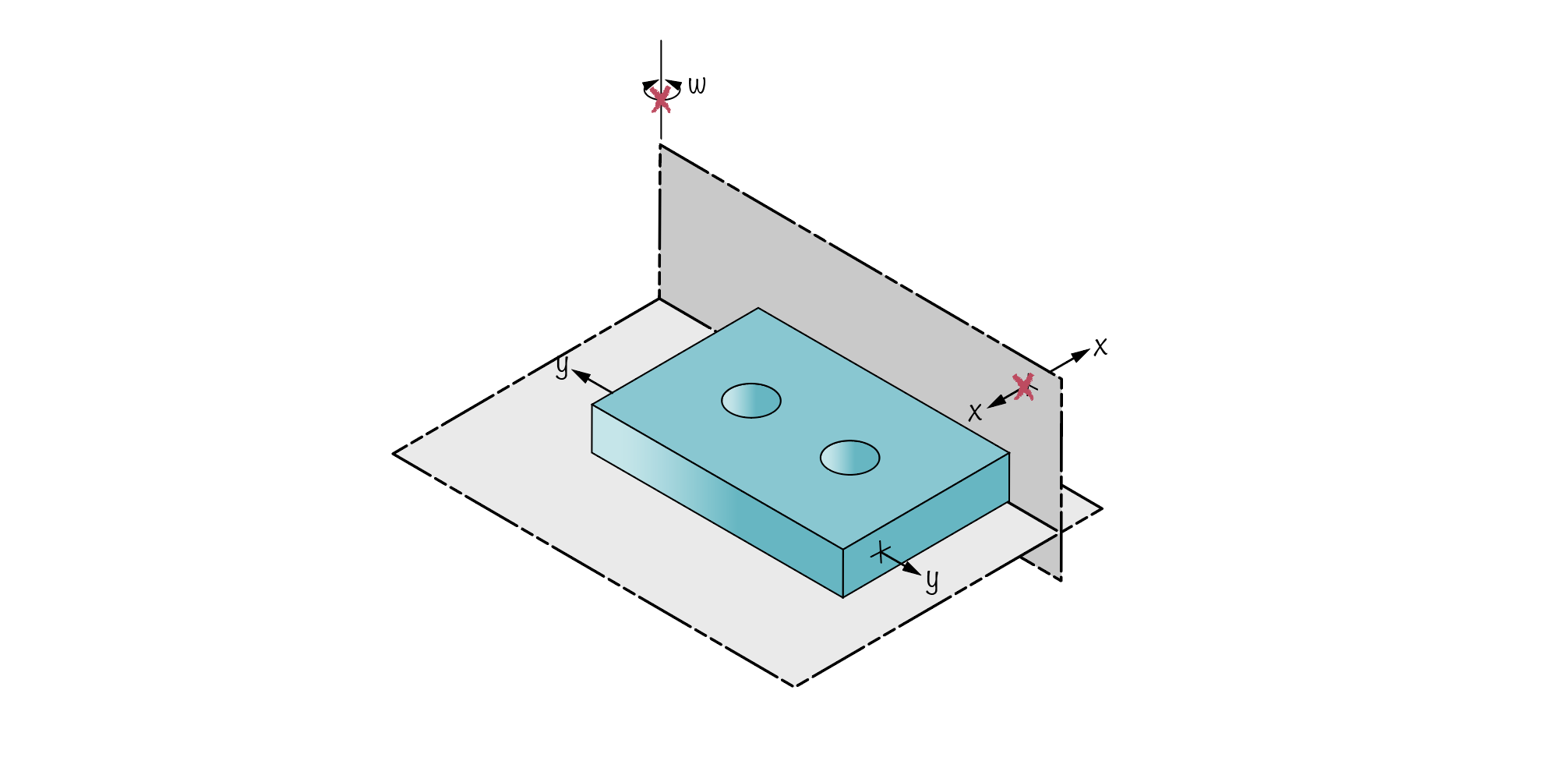
그러한 파트가 평면 하나와 관계를 맺으면 파트는 병진자유도 1개와 회전자유도 2개를 잃는다.

계속해서, 파트의 다른 면을 앞선 평면에 수직인 평면과 관계를 맺으면 파트는 남아 있는 자유도 중 병진자유도 1개와 회전자유도 1개를 잃는다.
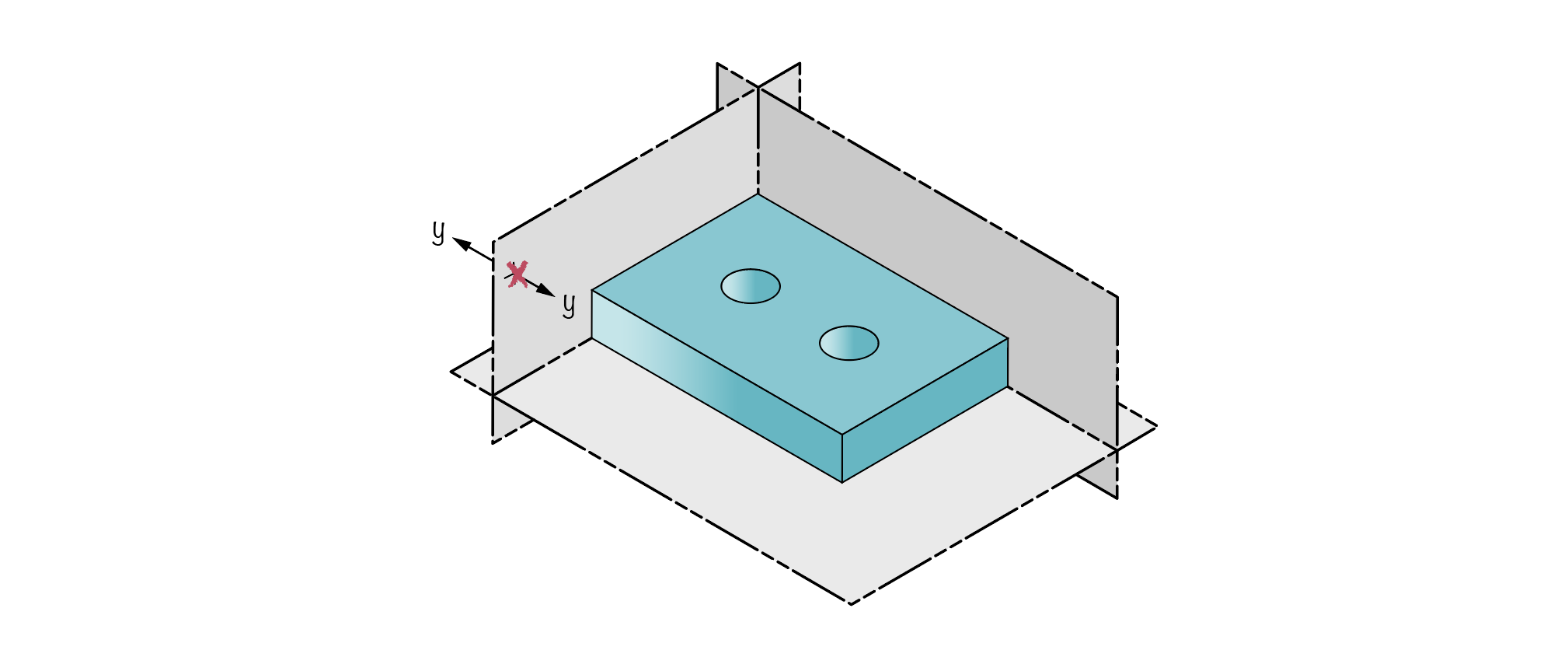
계속해서, 파트의 또다른 면을 앞선 두 평면에 수직인 평면과 관계를 맺으면 파트는 남아 있는 자유도 1개 마저 잃게 된다.
결과적으로 파트는 평면 3개에 의해 생성된 공간 안에서 움직일 수 없게 된다.
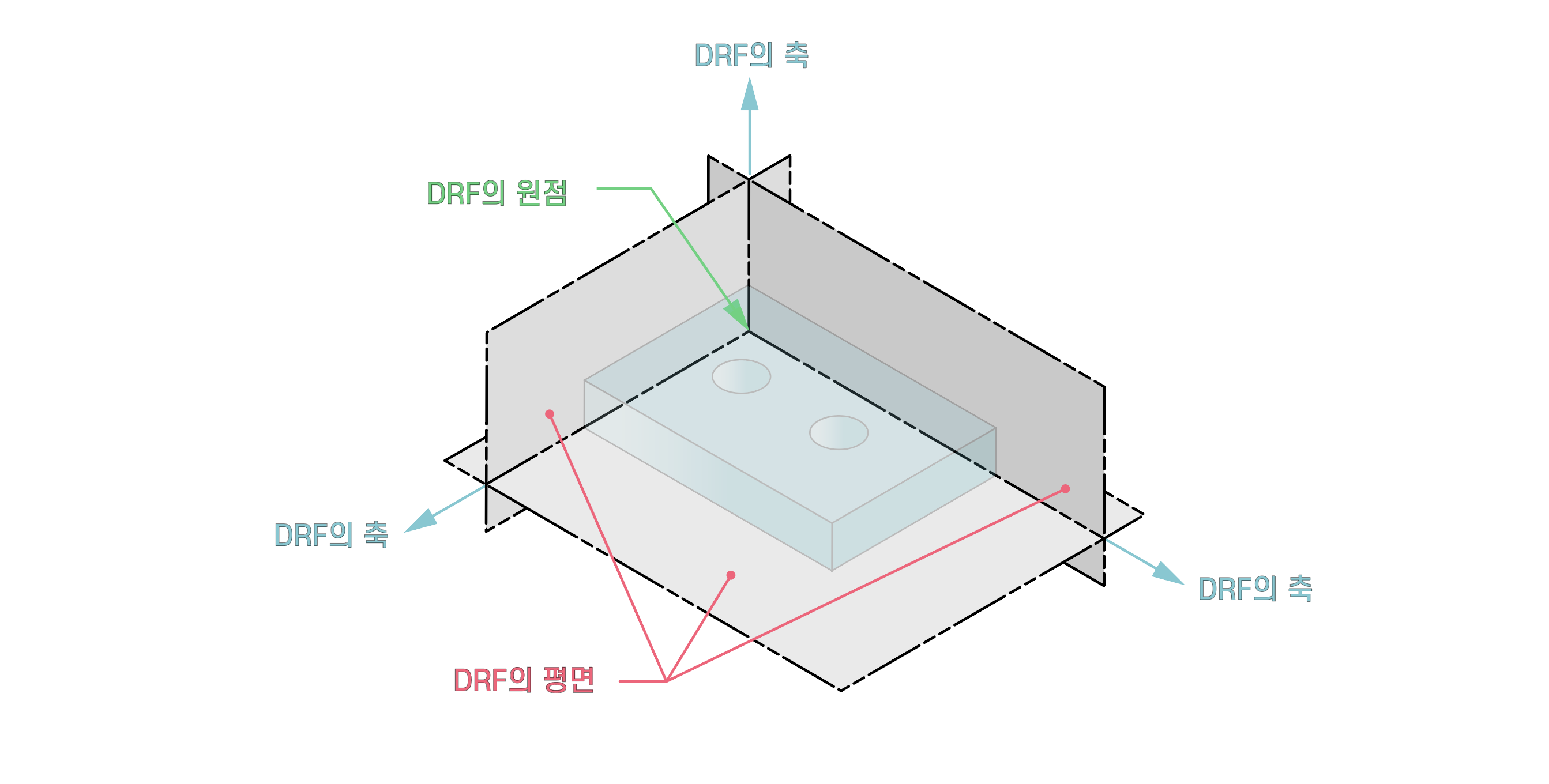
이렇게 파트에 의해 생성된 공간을 DRF(Datum Reference Frame)이라고 한다.
DRF는 서로 수직한 세 개의 평면으로 구성되고, 두 평면이 교차하는 곳에 축이 생성되고, 세 평면이 교차하는 곳에 원점이 생성된다.
DRF는 실제 파트에 의해 생성된다. 구체적으로 실제 파트의 데이텀 피쳐에 의해 생성된다.
DRF는 가상의 것이지만, 실제 파트 없이 DRF를 만들 수 없다. DRF는 항상 실제 파트에 의해 생성된다.
'기하공차 기초' 카테고리의 다른 글
| 기초 #26 데이텀 피쳐에 의해 공차영역의 자유도가 제한된다. (0) | 2024.11.12 |
|---|---|
| 기초 #25 베이직 치수를 나타내는 방법 (0) | 2024.11.12 |
| 기초 #23 Rule #2 : ASME Y14.5에서 가장 중요하고 기본이 되는 원칙 (0) | 2024.11.12 |
| 기초 #22 데이텀 피쳐를 수정하여 참조하게 하는 모디파이어 (4개) (0) | 2024.11.12 |
| 기초 #21 데이텀 피쳐를 식별하는 방법 (1) | 2024.11.12 |



