
3차원 공간에서 입체도형은 6방향으로 움직일 수 있다.
3차원 공간을 설명하기에 앞서 2차원 평면에서의 움직임을 먼저 살펴보자.
모든 평면도형은 평면상에서 3방향으로 자유롭게 움직일 수 있다.
좌우로 움직일 수 있고, 앞뒤로 움직일 수 있다. 그리고 평면상에서 회전할 수 있다.
이를 두고 병진자유도 2개와 회전자유도 1개가 있다라고 한다.

GD&T에서 모든 파트는 3차원 형상인 입체도형이다.
따라서 3차원 공간에서 입체도형의 자유도를 살펴볼 필요가 있다.
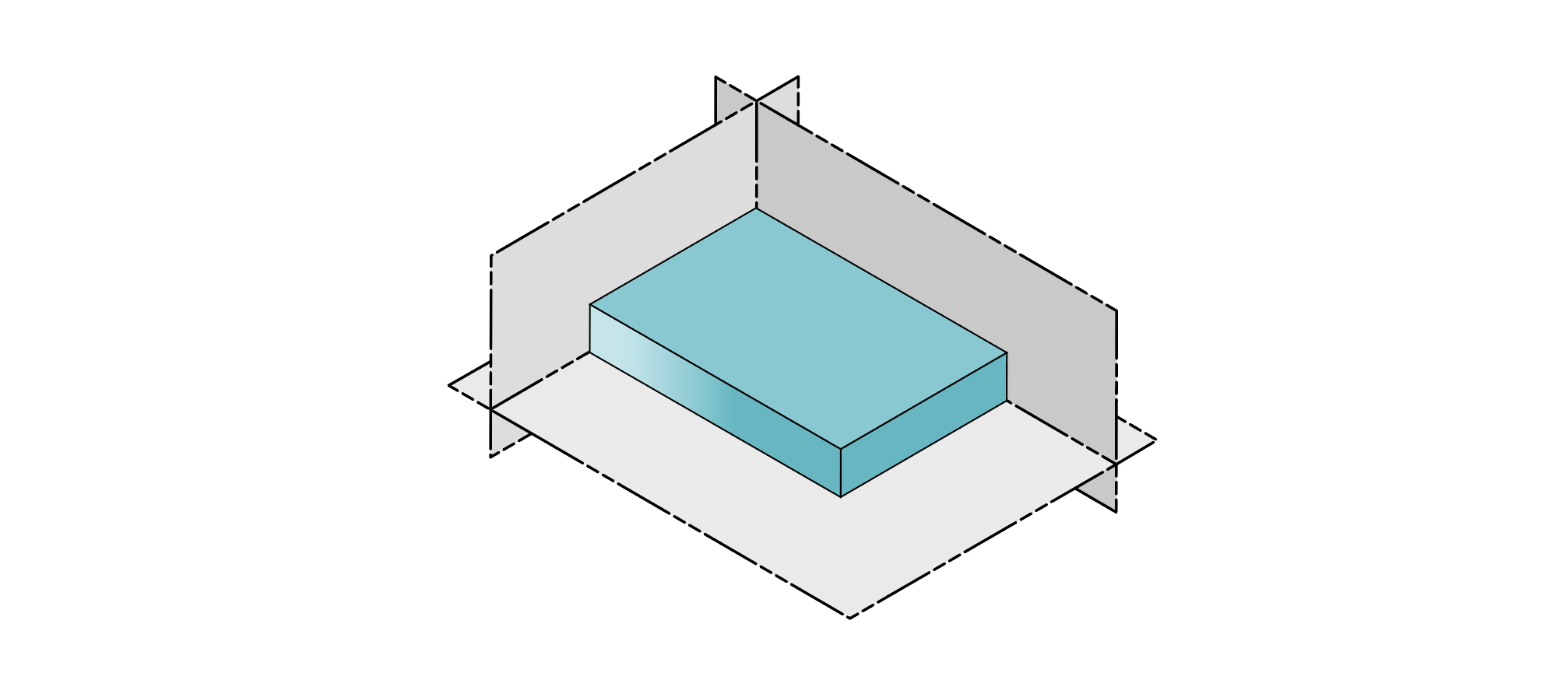
3차원 공간은 서로 수직하는 평면 3개로 이루어진다. 2차원인 평면 3개로 이루어진다. 각 평면에서 병진이 2방향, 회전이 1방향으로 가능하다. 이를 단순히 더하면 병진은 6방향이 가능하지만, 중복되는 방향이 있기 때문에 이를 제외하면, 병진은 3방향이 가능하다. 결과적으로 3차원 공간상에서는 병진이 3방향, 회전이 3방향으로 가능하다.
입체도형이 3차원 공간에 놓이게 되면 6방향으로 움직일 수 있다. 이를 두고 자유도 6개가 있다고 말한다. 병진자유도는 X축을 따라서 움직이는 x자유도, Y축을 따라 움직이는 y자유도, Z축을 따라 움직이는 z자유도가 있다. 회전자유도는 X축 둘레를 회전하는 u자유도, Y축 둘레를 회전하는 v자유도, Z축 둘레를 회전하는 z자유도가 있다.

GD&T에서 FCF를 통해 정의되는 3차원 형상의 공차영역은 6개의 자유도가 있다. 하지만 데이텀 피쳐를 참조함으로써 공차영역의 자유도는 제한된다.
데이텀 피쳐는 도면에 식별되고, FCF의 순서가 있게 참조된다. 데이텀 피쳐는 제작편차가 있기 때문에, 완전한 데이텀은 불완전한 피쳐로부터 직접 유도할 수 없다. 달리 명시한 것이 없다면, 가상의 시뮬레이터는 완벽하고, 불완전한 데이텀 피쳐의 가장 높은 점에서 접촉한다. 이러한 가상의 데이텀 시뮬레이터는 데이텀 피쳐로부터 데이텀을 유도하고, 파트의 자유도를 구속하고, DRF를 생성한다.
파트를 DRF의 하나 이상의 평면과 연결하기 위해 데이텀 피쳐를 선정한다. DRF는 가상적으로 존재한다. 따라서 현실 세계의 피쳐와 가상 세계를 연결하는 방법을 정의할 필요가 있다. 실제로 피쳐는 시뮬레이터와 물리적으로 연관된다. 이것은 파트와 DRF 사이의 자유도를 구속한다.
DRF는 서로 수직하는 세 개의 평면으로 이루어진 공간으로 이루어진다. 의 평면은 치수의 방향과 원점을 제공하기 위해 서로 수직한 관계로 시뮬레이트된다. 이러한 가상의 참조좌표계는 치수와 공차를 위한 직교좌표계를 구성한다
파트의 데이텀 피쳐로부터 데이텀과 DRF를 생성하는 방법을 수학적으로 설명한다. DRF는 파트의 피쳐의 위치와 자세를 표현하는 좌표시스템이다.

파트가 공간상에서 고정되고, DRF가 파트와 연관되어 움직인다고 설명한다. 이를 반대로 생각하는 것도 가능하다. DRF가 공간상에서 고정되고, 파트가 DRF와 연관되어 움직인다고 생각할 수도 있다. 이는 서로 다르지만 결과는 같다. 물리적으로 실체가 있는 파트를 고정하고, 가상적으로 존재하는 DRF가 움직이는 것이 상상하기가 더 쉽기 때문에, 파트를 고정하고 DRF가 움직일 수 있다고 생각하자.
'데이텀' 카테고리의 다른 글
| 모든 피쳐에 있는 RMB 경계, 특별한 경우에만 있는 MMB 경계, LMB 경계 (0) | 2024.01.31 |
|---|---|
| 최종적으로 DRF의 자유도가 무엇이 남는지가 중요하다. (0) | 2024.01.20 |
| 데이텀 피쳐에서 데이텀을 도출하는 과정 (0) | 2024.01.18 |
| 데이텀 피쳐의 형상에 따라 제한되는 자유도가 달라진다. (0) | 2024.01.17 |
| 데이텀 피쳐에 의해 공차영역의 자유도가 제한된다. (0) | 2024.01.16 |



