
평면서피스는 어떻게 통제해야 할까?

어떤 기하공차를 사용하느냐에 따라 통제하는 내용이 달라진다. 기하공차의 종류에 따라 어떻게 달라지는지 살펴보자.

평면서피스는 평면공차, 평행공차, 윤곽공차를 사용하여 통제할 수 있다. 세 공차가 모두 평면서피스를 통제할 수 있지만 각각의 공차는 각각 다른 내용으로 통제한다.
모든 입체는 자유도가 6개 있다. 공차영역도 마찬가지로 병진자유도 3개와 회전자유도 3개를 가진다. 하지만 공차의 종류에 따라 각각 다르게 공차영역의 자유도가 구속된다. 세 개의 기하공차의 공차영역의 자유도가 각각 어떻게 다르게 구속되는지 비교하여 살펴보면, 각각의 기하공차가 가지는 의미를 구분할 수 있게 된다.
먼저 평면공차를 살펴보자.

그림의 평면공차는 너비가 0.3인 공차영역을 생성한다. 평면공차는 피쳐 자신의 모양만을 평가한다. 따라서 다른 피쳐와 비교할 필요가 없다. 그래서 데이텀 피쳐를 참조하지 않는다. 평면공차에 의해 생기는 공차영역은 모든 자유도가 구속되지 않는다. 따라서 평면공차에 의해 생기는 공차영역은 공간상에서 모든 방향으로 자유롭게 움직일 수 있다.

실제 파트의 모양을 평가하기 위해 실제 파트의 모양편차를 측정한다. 그리고 측정된 모양편차가 정의된 공차영역 안에 있는지 확인한다. 모양공차에 의한 공차영역은 모든 자유도가 구속되지 않았기 때문에 공차영역은 공간상에서 자유롭게 이동할 수 있다. 간단하게 2차원 화면에 표현할 수 있는 자유도만을 설명한다.

일단 실제로 제작된 파트의 위치를 고정한다. 평면공차에 의해 생성된 공차영역은 회전이동과 병진이동이 가능하다. 따라서 파트의 편차를 최대한 수용할 수 있도록 공차영역을 반시계 방향으로 회전시킨 후 아래 방향으로 이동시켰다.
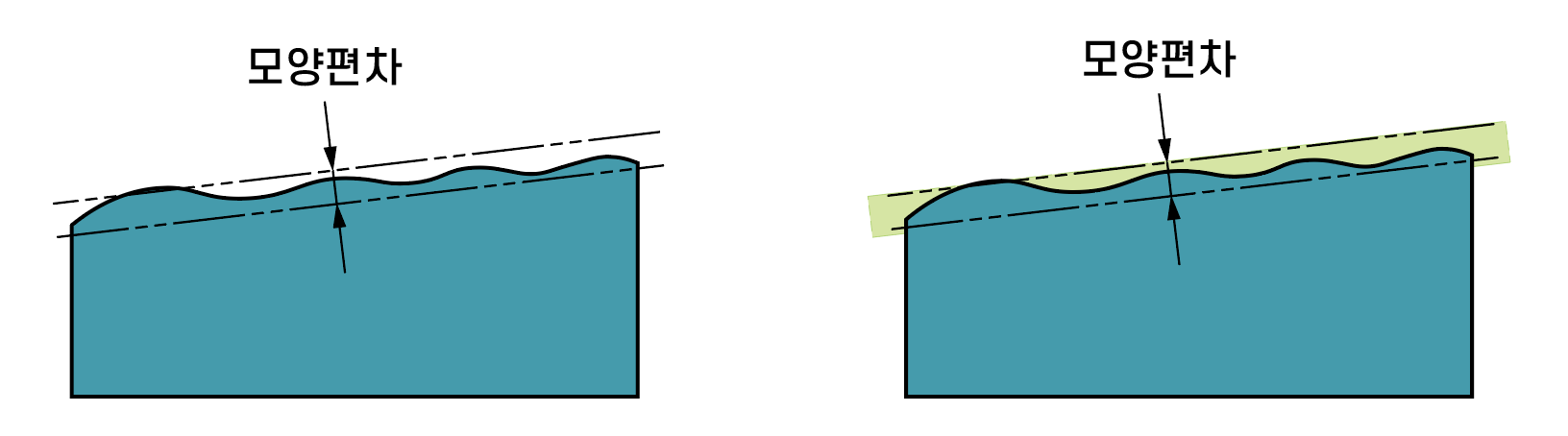
파트의 모양편차가 공차영역에 모두 수용된다면, 파트는 정의된 평면공차를 만족한 것이다.
다음으로 자세공차를 살펴보자.

그림의 자세공차는 너비가 0.5인 공차영역을 생성한다. 자세공차는 피쳐의 자세를 평가한다. 따라서 다른 피쳐와 비교가 필요하다. 그래서 항상 데이텀 피쳐를 참조한다. 자세공차는 데이텀 피쳐가 구속할 수 있는 능력 중에서 병진자유도를 구속할 수 있는 능력을 사용하지 않는다. 따라서 자세공차는 데이텀 피쳐가 구속할 수 있는 능력 중에서 회전자유도를 구속할 수 있는 능력만을 사용한다. 그림의 데이텀 피쳐 A는 평면 서피스로 회전자유도 2개와 병진자유도 1개를 구속할 수 있는 능력을 가지고 있다. 하지만 자세공차는 회전자유도를 구속할 수 있는 능력만을 사용하기 때문에 데이텀 피쳐 A에 의해서 회전자유도만 2개 구속된다.
결과적으로 자세공차에 의해 정의되는 공차영역은 데이텀 A에 대해 평행하게 자세가 고정된다. 그리고 병진자유도는 구속되지 않기 때문에 공차영역의 위치는 고정되지 않는다. 따라서 공차영역은 위아래로 좌우로 앞뒤로 이동이 가능하다.
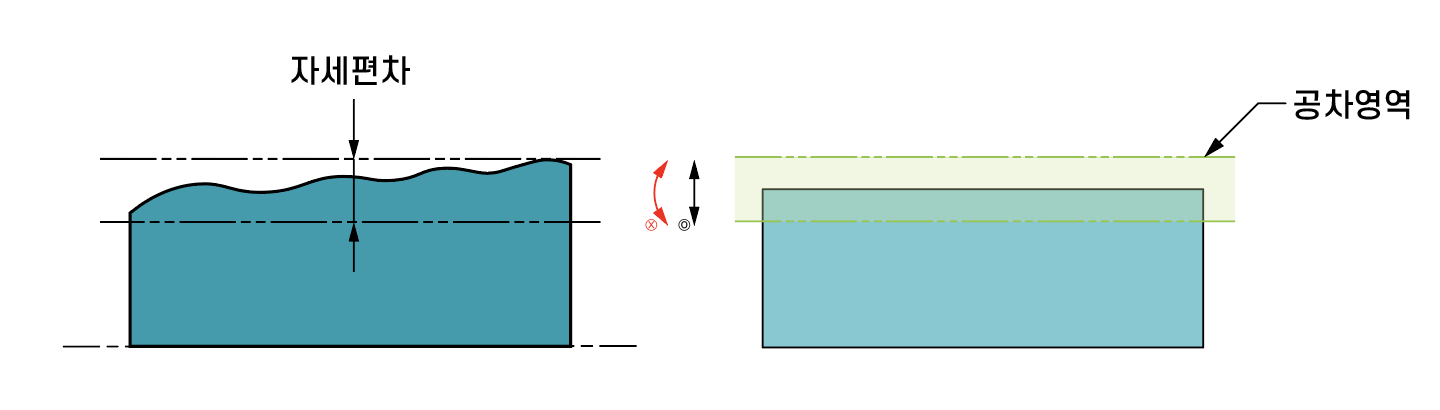
실제 파트의 자세를 평가하기 위해 실제 파트의 자세편차를 측정한다. 그리고 측정된 자세편차가 정의된 공차영역 안에 있는지 확인한다. 자세공차에 의한 공차영역은 회전자유도만 구속되었기 때문에 공차영역은 병진이동은 자유롭게 할 수 있다.

일단 실제로 제작된 파트의 위치를 고정한다. 자세공차에 의해 생성된 공차영역은 병진이동만 가능하다. 따라서 파트의 편차를 최대한 수용할 수 있도록 공차영역을 아래 방향으로 이동시켰다.
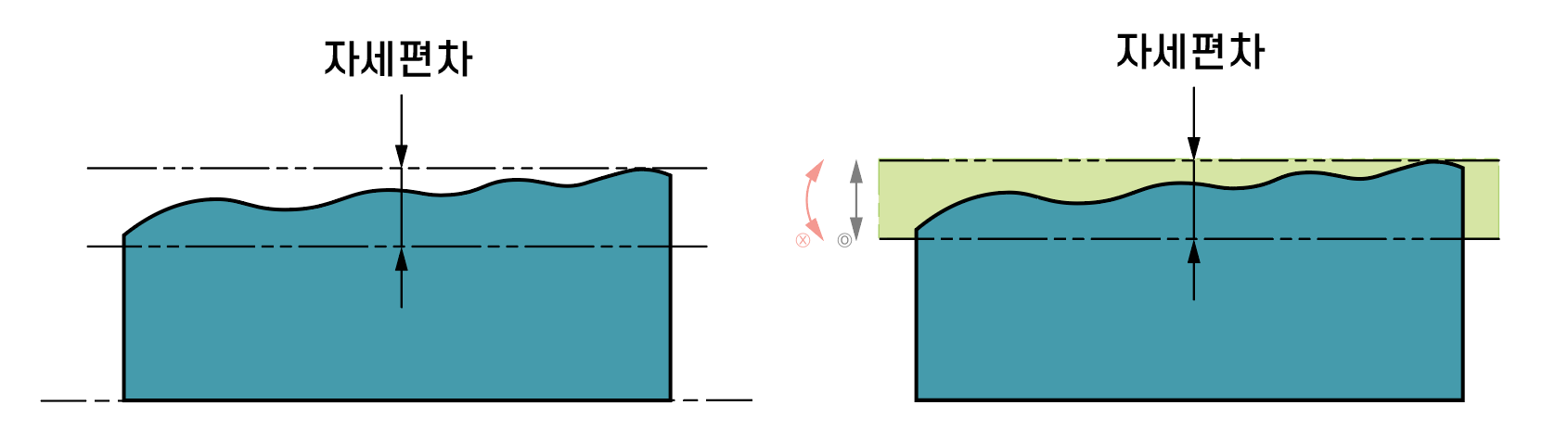
파트의 자세편차가 공차영역에 모두 수용된다면, 파트는 정의된 자세공차를 만족한 것이다.
다음으로 윤곽공차를 살펴보자.

그림의 윤곽공차는 너비가 1.0인 공차영역을 생성한다. 윤곽공차는 피쳐의 위치를 평가한다. 따라서 다른 피쳐와 비교가 필요하다. 그래서 항상 데이텀 피쳐를 참조한다. 위치공차는 데이텀 피쳐가 구속할 수 있는 능력을 모두 사용한다. 그림의 데이텀 피쳐 A는 평면 서피스로 회전자유도 2개와 병진자유도 1개를 구속할 수 있는 능력을 가지고 있다. 따라서 데이텀 피쳐 A에 의해 회전자유도 2개와 병진자유도 1개가 구속된다.
결과적으로 윤곽공차에 의해 정의되는 공차영역은 데이텀 A에 대해 평행하게 자세가 고정된다. 따라서 공차영역은 화면에서 보이는 방향은 회전할 수 없다. 그리고 공차영역의 위치는 데이텀 A에 대해 20만큼 떨어진 곳에 고정된다. 따라서 공차영역은 위아래로 움직일 수 없다.

실제 파트의 위치를 평가하기 위해 실제 파트의 위치편차를 측정한다. 그리고 측정된 위치편차가 정의된 공차영역 안에 있는지 확인한다. 윤곽공차에 의한 공차영역은 데이텀 피쳐 A에 의한 자유도가 구속된다. 따라서 공차영역은 데이텀 피쳐 A에 의해 구속된 자유도는 회전하거나 병진이동할 수 없다.

일단 실제로 제작된 파트의 위치를 고정한다. 윤곽공차에 의해 생성된 공차영역은 회전이동도 병진이동도 허용되지 않는다. 따라서 평면공차나 자세공차와 달리 파트의 편차를 최대한 수용할 수 있도록 공차영역을 회전시키거나 병진이동시킬 수 없다.
파트의 위치편차가 공차영역에 모두 수용된다면, 파트는 정의된 위치공차를 만족한 것이다.
따라서 동일한 피쳐이지만 어떠한 공차로 정의하여 어떤 편차를 평가하느냐에 따라 파트는 합격될 수도 있고 합격되지 않을 수도 있다. 치수공차는 요구사항을 값으로만 표현하지만 기하공차는 데이텀 피쳐를 참조하여 공차영역의 회전과 병진이동에 대한 구속까지 표현할 수 있다. 실제로 경우에 따라 피쳐는 회전과 병진이동이 허용될 수도 있고 허용되지 않을 수도 있다. 이러한 내용은 치수공차로는 절대로 표현할 수 없다.
'공통사항' 카테고리의 다른 글
| 규제특성 : 기하공차 종류에 따라 특정한 기하학적 속성을 통제한다. (0) | 2024.02.18 |
|---|---|
| 공차조건을 수정하는 모디파이어 (7개) (0) | 2024.02.09 |
| 공차영역 형상을 정의하는 심볼 (∅,S∅) (0) | 2024.02.08 |
| 회전 서피스를 통제하는 공차영역의 자유도 제한방법 (0) | 2024.01.08 |
| 평면 서피스를 통제하는 방법 - 3차원과 2차원 공차영역 (0) | 2024.01.07 |



