기하공차 기초
기초 #24 DRF(데이텀 레퍼런스 프레임)은 실제 파트에 의해 생성된다.
윤선임
2024. 11. 12. 21:43

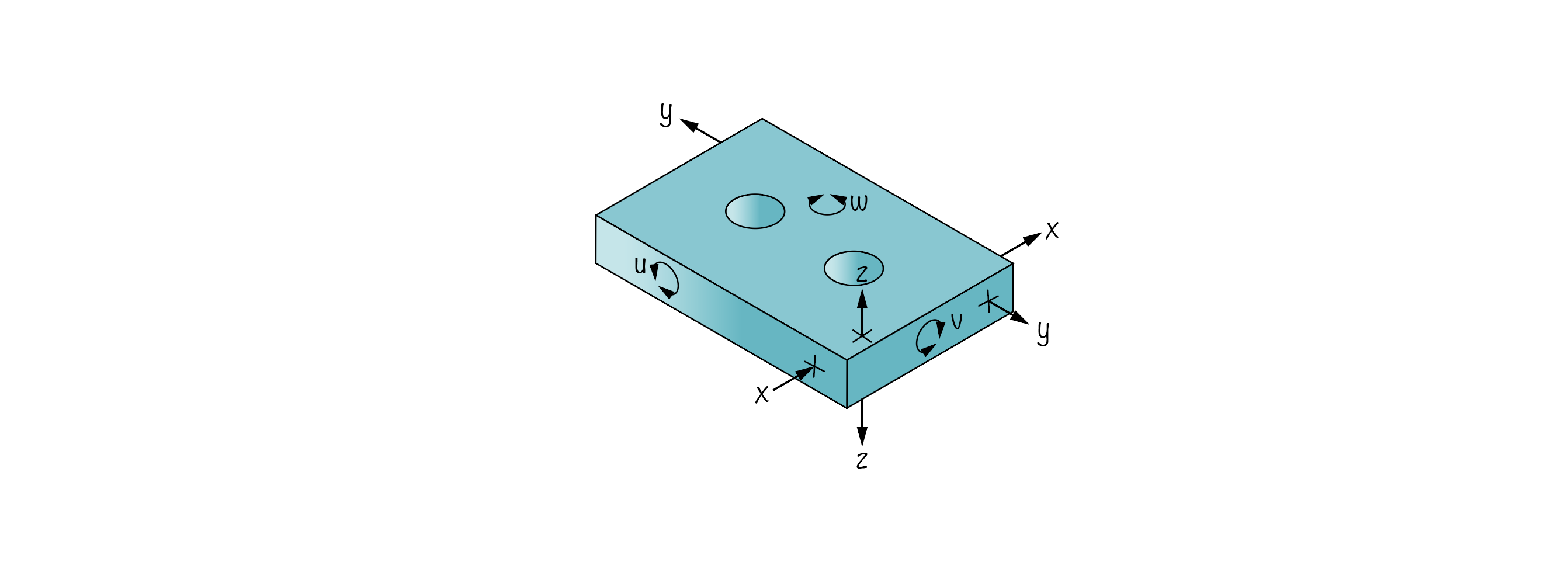
모든 파트는 병진자유도 3개와 회전자유도 3개를 가지고 있다. 즉, 파트는 6개 방향으로 움직일 수 있다.
모든 공간은 평면 3개와 축3개에 의해 3차원으로 이루어진다. 파트가 공간에 놓이거나 파트에 공간이 생기면서 파트와 공간이 서로 관계를 맺게 된다.
그러한 파트가 평면 하나와 관계를 맺으면 파트는 병진자유도 1개와 회전자유도 2개를 잃는다.

계속해서, 파트의 다른 면을 앞선 평면에 수직인 평면과 관계를 맺으면 파트는 남아 있는 자유도 중 병진자유도 1개와 회전자유도 1개를 잃는다.

계속해서, 파트의 또다른 면을 앞선 두 평면에 수직인 평면과 관계를 맺으면 파트는 남아 있는 자유도 1개 마저 잃게 된다.
결과적으로 파트는 평면 3개에 의해 생성된 공간 안에서 움직일 수 없게 된다.

이렇게 파트에 의해 생성된 공간을 DRF(Datum Reference Frame)이라고 한다.
DRF는 서로 수직한 세 개의 평면으로 구성되고, 두 평면이 교차하는 곳에 축이 생성되고, 세 평면이 교차하는 곳에 원점이 생성된다.

DRF는 실제 파트에 의해 생성된다. 구체적으로 실제 파트의 데이텀 피쳐에 의해 생성된다.
DRF는 가상의 것이지만, 실제 파트 없이 DRF를 만들 수 없다. DRF는 항상 실제 파트에 의해 생성된다.